
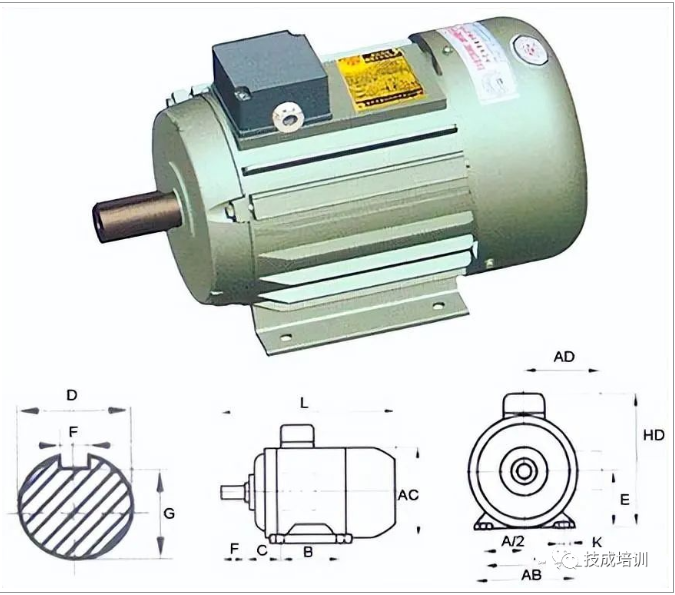
तीन-चरणको एसिन्क्रोनसमोटरयो एक प्रकारको इन्डक्सन मोटर हो जुन ३८०V तीन-चरण एसी करेन्ट (१२० डिग्रीको चरण भिन्नता) एकैसाथ जडान गरेर संचालित हुन्छ। तीन-चरण एसिन्क्रोनस मोटरको रोटर र स्टेटर घुम्ने चुम्बकीय क्षेत्र एउटै दिशामा र फरक गतिमा घुम्ने भएकाले, त्यहाँ स्लिप रेट हुन्छ, त्यसैले यसलाई तीन-चरण एसिन्क्रोनस मोटर भनिन्छ।
तीन-चरणको एसिन्क्रोनस मोटरको रोटरको गति घुम्ने चुम्बकीय क्षेत्रको गति भन्दा कम हुन्छ। रोटर वाइन्डिङले चुम्बकीय क्षेत्रसँग सापेक्षिक गतिको कारणले इलेक्ट्रोमोटिभ बल र प्रवाह उत्पन्न गर्छ, र चुम्बकीय क्षेत्रसँग अन्तरक्रिया गरेर विद्युत चुम्बकीय टर्क उत्पन्न गर्छ, ऊर्जा रूपान्तरण प्राप्त गर्छ।
एकल-चरण एसिन्क्रोनससँग तुलनामोटरहरू, तीन-चरण एसिन्क्रोनसमोटरहरूराम्रो सञ्चालन प्रदर्शन छ र विभिन्न सामग्रीहरू बचत गर्न सक्छ।
विभिन्न रोटर संरचनाहरू अनुसार, तीन-चरण एसिन्क्रोनस मोटरहरूलाई पिंजरा प्रकार र घाउ प्रकारमा विभाजन गर्न सकिन्छ।
केज रोटर भएको एसिन्क्रोनस मोटरको संरचना सरल, भरपर्दो सञ्चालन, हल्का तौल र कम मूल्य छ, जुन व्यापक रूपमा प्रयोग गरिएको छ। यसको मुख्य कमजोरी गति नियमनमा कठिनाई हो।
घाउ भएको तीन-चरणको एसिन्क्रोनस मोटरको रोटर र स्टेटर पनि तीन-चरणको विन्डिङले सुसज्जित हुन्छन् र स्लिप रिङ, ब्रस मार्फत बाह्य रियोस्टेटमा जोडिएका हुन्छन्। रियोस्टेटको प्रतिरोध समायोजन गर्नाले मोटरको सुरुवाती कार्यसम्पादनमा सुधार हुन सक्छ र मोटरको गति समायोजन गर्न सकिन्छ।
तीन-चरण एसिन्क्रोनस मोटरको कार्य सिद्धान्त
थ्री-फेज स्टेटर वाइन्डिङमा सममित थ्री-फेज अल्टरनेटिंग करेन्ट लागू गर्दा, एक घुम्ने चुम्बकीय क्षेत्र उत्पन्न हुन्छ जुन स्टेटर र रोटरको भित्री गोलाकार स्पेसमा घडीको दिशामा सिंक्रोनस गति n1 मा घुम्छ।
घुम्ने चुम्बकीय क्षेत्र n1 गतिमा घुम्ने भएकोले, रोटर कन्डक्टर सुरुमा स्थिर हुन्छ, त्यसैले रोटर कन्डक्टरले प्रेरित इलेक्ट्रोमोटिभ बल उत्पन्न गर्न स्टेटर घुम्ने चुम्बकीय क्षेत्रलाई काट्नेछ (प्रेरित इलेक्ट्रोमोटिभ बलको दिशा दायाँ-हात नियमद्वारा निर्धारण गरिन्छ)।
रोटर कन्डक्टरको दुबै छेउमा सर्ट-सर्किट रिंगद्वारा छोटो सर्किट हुने कारणले गर्दा, प्रेरित इलेक्ट्रोमोटिभ बलको कार्य अन्तर्गत, रोटर कन्डक्टरले एक प्रेरित प्रवाह उत्पन्न गर्नेछ जुन मूल रूपमा प्रेरित इलेक्ट्रोमोटिभ बलको दिशामा हुन्छ। रोटरको वर्तमान बोक्ने कन्डक्टर स्टेटर चुम्बकीय क्षेत्रमा विद्युत चुम्बकीय बलको अधीनमा हुन्छ (बलको दिशा बायाँ-हातको नियम प्रयोग गरेर निर्धारण गरिन्छ)। विद्युत चुम्बकीय बलले रोटर शाफ्टमा विद्युत चुम्बकीय टर्क उत्पन्न गर्दछ, रोटरलाई घुम्ने चुम्बकीय क्षेत्रको दिशामा घुमाउन प्रेरित गर्दछ।
माथिको विश्लेषणबाट, यो निष्कर्षमा पुग्न सकिन्छ कि विद्युतीय मोटरको कार्य सिद्धान्त निम्नानुसार छ: जब मोटरको तीन-चरण स्टेटर विन्डिङहरू (प्रत्येक १२० डिग्री विद्युतीय कोण भिन्नता भएको) लाई तीन-चरण सममित वैकल्पिक प्रवाहले खुवाइन्छ, घुम्ने चुम्बकीय क्षेत्र उत्पन्न हुन्छ, जसले रोटर विन्डिङलाई काट्छ र रोटर विन्डिङमा प्रेरित प्रवाह उत्पन्न गर्छ (रोटर विन्डिङ एक बन्द सर्किट हो)। वर्तमान बोक्ने रोटर कन्डक्टरले स्टेटर घुम्ने चुम्बकीय क्षेत्रको कार्य अन्तर्गत विद्युत चुम्बकीय बल उत्पन्न गर्नेछ, यसरी, मोटर शाफ्टमा विद्युत चुम्बकीय टर्क बनाइन्छ, जसले मोटरलाई घुम्ने चुम्बकीय क्षेत्र जस्तै दिशामा घुमाउन चलाउँछ।
तीन-चरण एसिन्क्रोनस मोटरको तार रेखाचित्र
तीन-चरण एसिन्क्रोनस मोटरहरूको आधारभूत तारिङ:
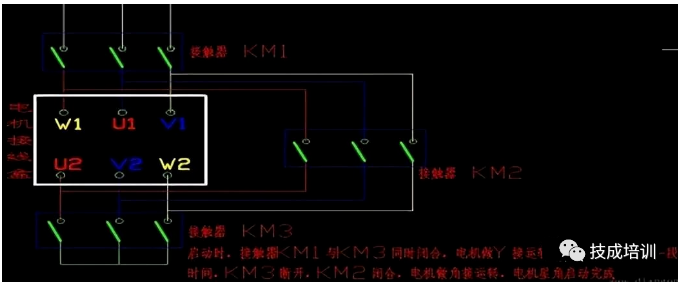
तीन-चरणको एसिन्क्रोनस मोटरको वाइन्डिङबाट प्राप्त छ वटा तारहरूलाई दुई आधारभूत जडान विधिहरूमा विभाजन गर्न सकिन्छ: डेल्टा डेल्टा जडान र तारा जडान।
छ तारहरू = तीन मोटर विन्डिङहरू = तीन हेड एन्डहरू + तीन टेल एन्डहरू, एउटै विन्डिङको हेड र टेल एन्डहरू बीचको जडान मापन गर्ने मल्टिमिटरको साथ, अर्थात् U1-U2, V1-V2, W1-W2।
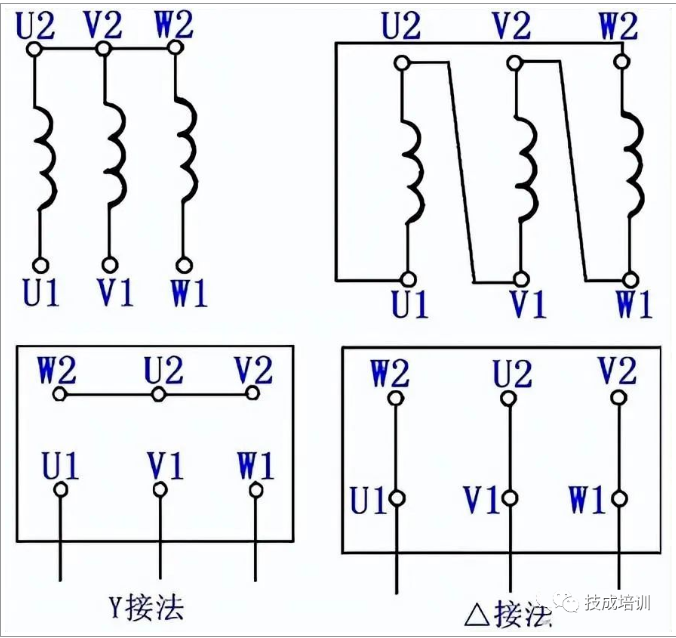
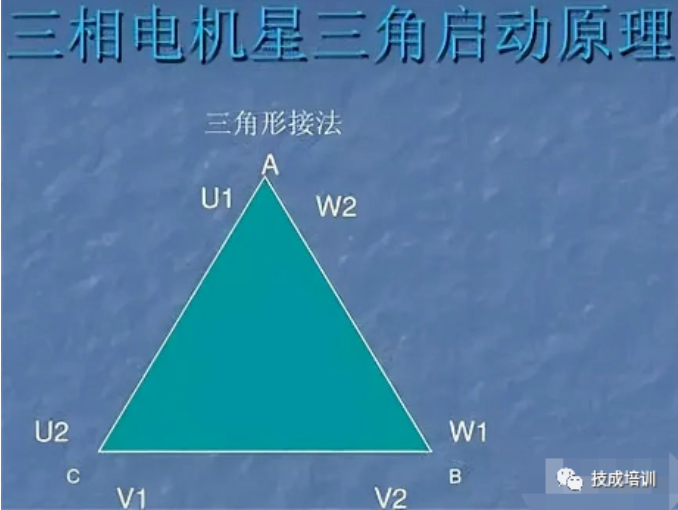
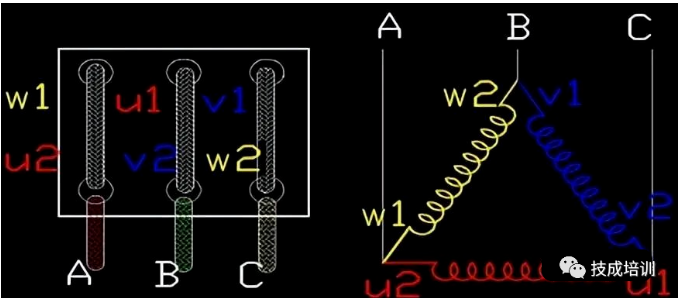
१. तीन-चरण एसिन्क्रोनस मोटरहरूको लागि त्रिकोण डेल्टा जडान विधि
त्रिकोण डेल्टा जडान विधि भनेको चित्रमा देखाइए अनुसार त्रिकोण बनाउनको लागि तीनवटा विन्डिङहरूको टाउको र पुच्छरहरूलाई क्रमशः जोड्नु हो:
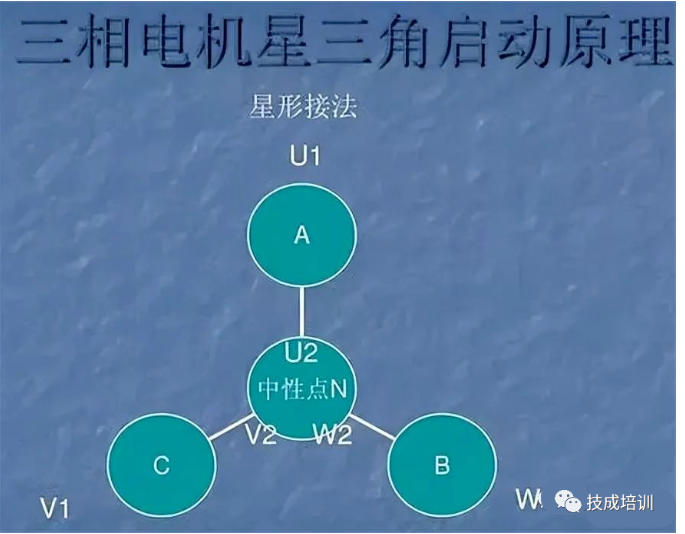
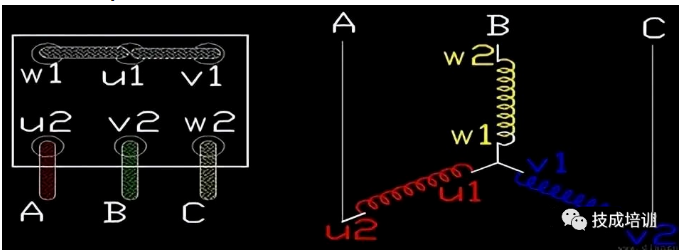
२. तीन-चरण एसिन्क्रोनस मोटरहरूको लागि तारा जडान विधि
तारा जडान विधि भनेको तीनवटा विन्डिङहरूको पुच्छर वा टाउकोको छेउलाई जोड्नु हो, र अन्य तीन तारहरूलाई पावर जडानको रूपमा प्रयोग गरिन्छ। चित्रमा देखाइएको जडान विधि:
चित्र र पाठमा तीन चरणको एसिन्क्रोनस मोटरको तार रेखाचित्रको व्याख्या
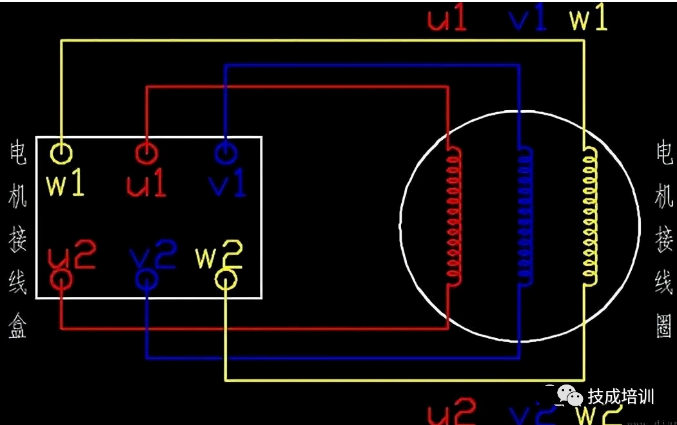
तीन चरण मोटर जंक्शन बक्स
जब तीन-चरणको एसिन्क्रोनस मोटर जडान हुन्छ, जंक्शन बक्समा जडान गर्ने टुक्राको जडान विधि निम्नानुसार हुन्छ:
जब तीन-चरणको एसिन्क्रोनस मोटर कुना जडान हुन्छ, जंक्शन बक्स जडान टुक्राको जडान विधि निम्नानुसार हुन्छ:
तीन-चरण एसिन्क्रोनस मोटरहरूको लागि दुई जडान विधिहरू छन्: तारा जडान र त्रिकोण जडान।
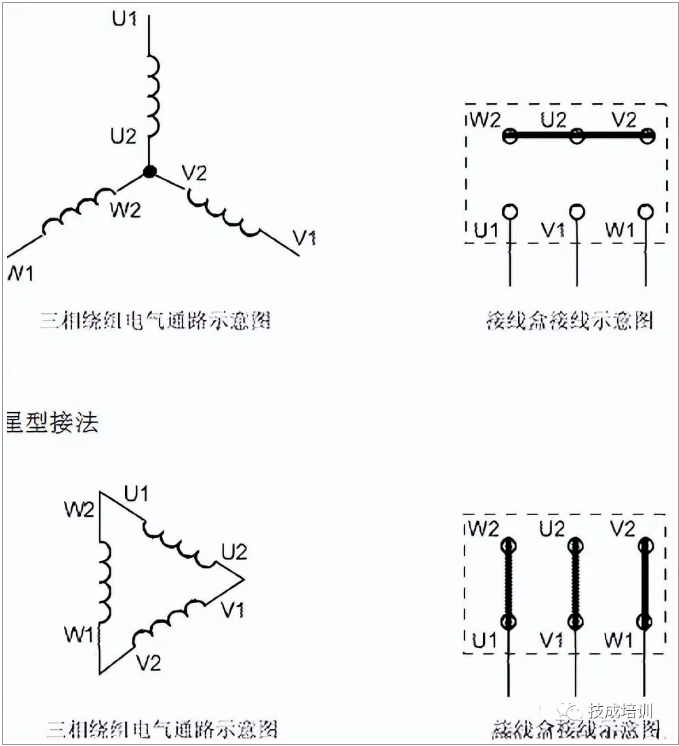
त्रिकोणीकरण विधि
एउटै भोल्टेज र तार व्यास भएका घुमाउरो कुण्डलहरूमा, तारा जडान विधिमा प्रति चरण तीन गुणा कम घुमाउरो (१.७३२ गुणा) र त्रिकोण जडान विधि भन्दा तीन गुणा कम शक्ति हुन्छ। समाप्त मोटरको जडान विधि ३८०V को भोल्टेज सहन गर्न निश्चित गरिएको छ र सामान्यतया परिमार्जनको लागि उपयुक्त छैन।
तीन-चरण भोल्टेज स्तर सामान्य ३८०V भन्दा फरक हुँदा मात्र जडान विधि परिवर्तन गर्न सकिन्छ। उदाहरणका लागि, जब तीन-चरण भोल्टेज स्तर २२०V हुन्छ, मूल तीन-चरण भोल्टेज ३८०V को तारा जडान विधिलाई त्रिकोण जडान विधिमा परिवर्तन गर्न लागू हुन सक्छ; जब तीन-चरण भोल्टेज स्तर ६६०V हुन्छ, मूल तीन-चरण भोल्टेज ३८०V डेल्टा जडान विधिलाई तारा जडान विधिमा परिवर्तन गर्न सकिन्छ, र यसको शक्ति अपरिवर्तित रहन्छ। सामान्यतया, कम-शक्ति मोटरहरू तारा जडान हुन्छन्, जबकि उच्च-शक्ति मोटरहरू डेल्टा जडान हुन्छन्।
मूल्याङ्कन गरिएको भोल्टेजमा, डेल्टा जडान गरिएको मोटर प्रयोग गर्नुपर्छ। यदि यसलाई तारा जडान गरिएको मोटरमा परिवर्तन गरियो भने, यो कम भोल्टेज सञ्चालनसँग सम्बन्धित छ, जसले गर्दा मोटरको शक्ति र सुरुवाती प्रवाहमा कमी आउँछ। उच्च-शक्तिको मोटर (डेल्टा जडान विधि) सुरु गर्दा, वर्तमान धेरै उच्च हुन्छ। लाइनमा सुरुवाती प्रवाहको प्रभाव कम गर्न, सामान्यतया स्टेप-डाउन सुरुवात अपनाइन्छ। एउटा विधि भनेको मूल डेल्टा जडान विधिलाई सुरुवातको लागि तारा जडान विधिमा परिवर्तन गर्नु हो। तारा जडान विधि सुरु भएपछि, यसलाई सञ्चालनको लागि डेल्टा जडान विधिमा रूपान्तरण गरिन्छ।
तीन-चरण एसिन्क्रोनस मोटरको तार रेखाचित्र
तीन-चरण एसिन्क्रोनस मोटरहरूको लागि अगाडि र उल्टो स्थानान्तरण लाइनहरूको भौतिक रेखाचित्र:
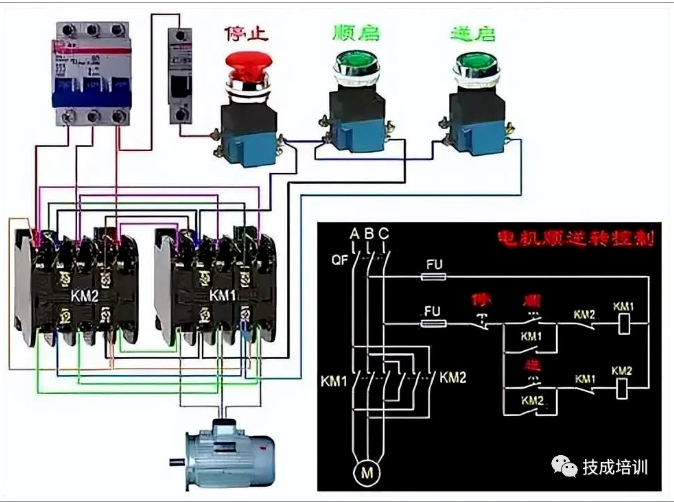
मोटरको अगाडि र उल्टो नियन्त्रण प्राप्त गर्न, यसको पावर सप्लाईको कुनै पनि दुई चरणहरू एकअर्काको सापेक्षमा समायोजन गर्न सकिन्छ (हामी यसलाई कम्युटेसन भन्छौं)। सामान्यतया, V चरण अपरिवर्तित रहन्छ, र U चरण र W चरण एकअर्काको सापेक्षमा समायोजन गरिन्छ। दुई कन्ट्याक्टरहरूले काम गर्दा मोटरको चरण अनुक्रम विश्वसनीय रूपमा आदानप्रदान गर्न सकिन्छ भनेर सुनिश्चित गर्न, सम्पर्कको माथिल्लो पोर्टमा तारहरू एकरूप हुनुपर्छ, र सम्पर्ककर्ताको तल्लो पोर्टमा चरण समायोजन गर्नुपर्छ। दुई चरणहरूको चरण अनुक्रम स्व्यापिङको कारणले गर्दा, दुई KM कुण्डलहरू एकै समयमा पावर गर्न सकिँदैन भनेर सुनिश्चित गर्न आवश्यक छ, अन्यथा गम्भीर चरण-दर-चरण सर्ट सर्किट त्रुटिहरू हुन सक्छन्। त्यसैले, इन्टरलकिङ अपनाउनु पर्छ।
सुरक्षा कारणहरूले गर्दा, बटन इन्टरलकिङ (मेकानिकल) र कन्ट्याक्टर इन्टरलकिङ (विद्युतीय) सहितको डबल इन्टरलकिङ फर्वार्ड र रिभर्स कन्ट्रोल सर्किट प्रायः प्रयोग गरिन्छ; बटन इन्टरलकिङ प्रयोग गरेर, अगाडि र रिभर्स बटनहरू एकैसाथ थिचिए पनि, चरण समायोजनको लागि प्रयोग गरिने दुई कन्ट्याक्टरहरू एकैसाथ पावर गर्न सकिँदैन, यान्त्रिक रूपमा चरण-दर-चरण सर्ट सर्किटहरूबाट बच्न।
थप रूपमा, लागू गरिएका कन्ट्याक्टरहरूको इन्टरलकिङको कारणले गर्दा, जबसम्म कुनै एक कन्ट्याक्टर सक्रिय हुन्छ, यसको लामो बन्द सम्पर्क बन्द हुँदैन। यस तरिकाले, मेकानिकल र इलेक्ट्रिकल डुअल इन्टरलकिङको प्रयोगमा, मोटरको पावर सप्लाई प्रणालीमा चरण-दर-चरण सर्ट सर्किट हुन सक्दैन, जसले मोटरलाई प्रभावकारी रूपमा सुरक्षित गर्दछ र चरण मोड्युलेसनको समयमा चरण-दर-चरण सर्ट सर्किटहरूबाट हुने दुर्घटनाहरूबाट बच्न सक्छ, जसले कन्ट्याक्टरलाई जलाउन सक्छ।
पोस्ट समय: अगस्ट-०७-२०२३


